Propagating orbital uncertainty onto the sky plane#
This tutorial shows how to use Particle.ephemeris(uncertainty=True) to propagate a
6x6 initial-state covariance matrix through the N-body integration onto the sky plane
via JAX forward-mode automatic differentiation.
We use linear error propagation via the Jacobian: $$\Sigma_{\text{sky}}(t) = J(t), \Sigma_{\text{init}}, J(t)^\top, \qquad J(t) = \frac{\partial(\text{RA, Dec})}{\partial \mathbf{q}_0}$$
The returned cov_radec is in arcsec$^2$; coords is a standard astropy SkyCoord.
import numpy as np
import jax.numpy as jnp
import matplotlib.pyplot as plt
import astropy.units as u
from astropy.time import Time
from jorbit import Particle
from jorbit.utils.states import CartesianState
RAD2ARCSEC = 180 / np.pi * 3600
First we’ll pull (274301) Wikipedia’s state from JPL Horizons at 2026-01-01 and build a Particle. This makes one network request:
t0 = Time("2026-01-01")
p = Particle.from_horizons("274301", time=t0)
print(p)
print("t_ref:", p.t_ref)
print("x (AU):", p.cartesian_state.x)
print("v (AU/day):", p.cartesian_state.v)
Particle: 274301
t_ref: 2026-01-01 00:01:09.184
x (AU): [[-1.95958228 -1.38178686 -0.42942657]]
v (AU/day): [[ 0.00770048 -0.00743586 -0.00217952]]
Next, let’s admit that we don’t know the asteroid’s initial state perfectly and express our uncertainty as a covariance matrix. We could use either CartesianState or KeplerianState here, but we’ll use CartesianState for now. We’ll construct a fresh CartesianState from the particle’s nominal state but add a diagonal cov matrix in (x, y, z, vx, vy, vz). The values here are intentionally large enough to make the propagated uncertainty visible in the plots.
Note that we use state.replace(cov=cov_init) as a shorthand to create a new CartesianState with the same nominal state but a different covariance. This is equivalent to CartesianState(x=state.x, v=state.v, time_reference=state.time_reference, acceleration_func_kwargs=state.acceleration_func_kwargs, cov=cov_init) but more concise.
sigma_pos = 1e-6 # AU (~150 km)
sigma_vel = 1e-7 # AU/day (~0.9 m/s)
cov_init = jnp.diag(
jnp.array(
[
sigma_pos**2,
sigma_pos**2,
sigma_pos**2,
sigma_vel**2,
sigma_vel**2,
sigma_vel**2,
]
)
)
# note, there are two equivalent ways to create the new CartesianState:
# we can either 1) write everything out explicitly
new_state = CartesianState(
x=p.cartesian_state.x,
v=p.cartesian_state.v,
relative_time=p.cartesian_state.relative_time,
time_reference=p.cartesian_state.time_reference,
cov=cov_init,
acceleration_func_kwargs=p.cartesian_state.acceleration_func_kwargs,
)
# or 2) use the `replace` method to only specify the fields we want to change
new_state = p.cartesian_state.replace(cov=cov_init)
print("cov shape:", new_state.cov.shape)
p = Particle(state=new_state)
cov shape: (6, 6)
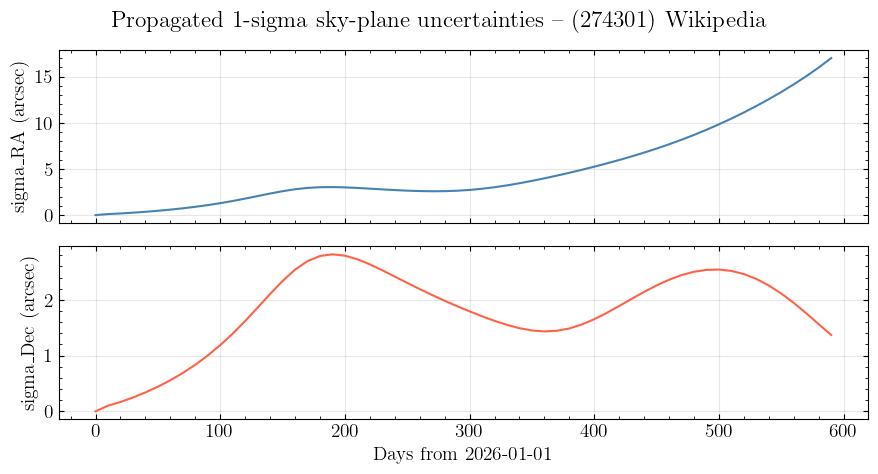
Now let’s run the propagation. Pass the state-with-covariance via state= and set uncertainty=True. The return value is a tuple of coords (shape (N,), astropy SkyCoord) and cov_radec (shape (N, 2, 2), units arcsec^2, axis order (RA, Dec)).
times = t0 + np.arange(0, 600, 10) * u.day # every 10 days for 600 days
result = p.ephemeris(times, "kitt peak", uncertainty=True)
ra = np.array(result[0].ra.rad) # (N,) radians
dec = np.array(result[0].dec.rad) # (N,) radians
cov_sky = np.array(result[1]) # (N, 2, 2) arcsec^2
sigma_ra_asec = np.sqrt(cov_sky[:, 0, 0])
sigma_dec_asec = np.sqrt(cov_sky[:, 1, 1])
days = np.arange(0, 600, 10)
print(f"sigma_ra at t=0: {sigma_ra_asec[0]:.4f} arcsec")
print(f"sigma_dec at t=0: {sigma_dec_asec[0]:.4f} arcsec")
print(f"sigma_ra at t=365: {sigma_ra_asec[-1]:.4f} arcsec")
print(f"sigma_dec at t=365: {sigma_dec_asec[-1]:.4f} arcsec")
sigma_ra at t=0: 0.0000 arcsec
sigma_dec at t=0: 0.0000 arcsec
sigma_ra at t=365: 17.0171 arcsec
sigma_dec at t=365: 1.3695 arcsec
We can plot the uncertainty in each dimension over time:
fig, axes = plt.subplots(2, 1, figsize=(9, 5), sharex=True)
axes[0].plot(days, sigma_ra_asec, color="steelblue")
axes[0].set_ylabel("sigma_RA (arcsec)")
axes[0].grid(True, alpha=0.3)
axes[1].plot(days, sigma_dec_asec, color="tomato")
axes[1].set_ylabel("sigma_Dec (arcsec)")
axes[1].set_xlabel("Days from 2026-01-01")
axes[1].grid(True, alpha=0.3)
fig.suptitle("Propagated 1-sigma sky-plane uncertainties -- (274301) Wikipedia", y=0.95)
fig.tight_layout()
plt.show()
We can also illustrate how the position angle and correlation of the sky-plane uncertainty ellipse evolves over time.
cov_sky is in coordinate (RA, Dec) arcsec$^2$ – the (0, 0) entry is the variance of RA itself, not of $\text{RA}\cos(\text{Dec})$. To get a tangent-plane view where both axes are true on-sky angular distances, we transform per-frame by
$$ \Sigma_{\text{tan}} = T, \Sigma_{\text{sky}}, T^\top, \qquad T = \mathrm{diag}(\cos(\text{Dec}),, 1), $$
using the nominal Dec at that time. For Wikipedia near the ecliptic the difference is small (cos(Dec) is close to 1), but applying the transform makes the axis labels honest.
from matplotlib.patches import Ellipse
from matplotlib.animation import FuncAnimation
from IPython.display import HTML, display
# Precompute tangent-plane ellipse parameters for every frame.
# cov_sky is in coordinate (RA, Dec) arcsec^2; transform to (RA*cos(Dec), Dec)
# so the ellipse axes are true on-sky angular distances.
ellipse_params = []
for i in range(len(days)):
T = np.diag([np.cos(dec[i]), 1.0])
cov_tangent = T @ cov_sky[i] @ T.T
vals, vecs = np.linalg.eigh(cov_tangent) # vals ascending
a = np.sqrt(vals[1]) # major semi-axis (arcsec)
b = np.sqrt(vals[0]) # minor semi-axis (arcsec)
angle = np.degrees(np.arctan2(vecs[1, 1], vecs[0, 1])) # deg from x-axis
ellipse_params.append((a, b, angle))
lim = ellipse_params[-1][0] * 1.3 # fix axes to final (largest) ellipse + 30% pad
fig, ax = plt.subplots(figsize=(6, 6))
ax.set_xlim(-lim, lim)
ax.set_ylim(-lim, lim)
ax.set_xlabel(r"$\Delta$RA cos(Dec) [arcsec]")
ax.set_ylabel(r"$\Delta$Dec [arcsec]")
ax.set_aspect("equal")
ax.axhline(0, color="gray", lw=0.5, zorder=1)
ax.axvline(0, color="gray", lw=0.5, zorder=1)
ax.scatter(0, 0, s=200, c="k", marker="*", zorder=5)
ax.grid(True, alpha=0.3)
a0, b0, ang0 = ellipse_params[0]
ell = Ellipse(
xy=(0, 0),
width=2 * a0,
height=2 * b0,
angle=ang0,
facecolor="steelblue",
edgecolor="steelblue",
alpha=0.4,
zorder=2,
)
ax.add_patch(ell)
title = ax.set_title("")
plt.tight_layout()
def update(frame):
a, b, angle = ellipse_params[frame]
ell.set_width(2 * a)
ell.set_height(2 * b)
ell.set_angle(angle)
date_str = times[frame].iso[:10]
title.set_text(f"{date_str} (day {days[frame]})")
return (ell,)
anim = FuncAnimation(fig, update, frames=len(days), interval=120, blit=True)
plt.close()
display(HTML(anim.to_jshtml()))
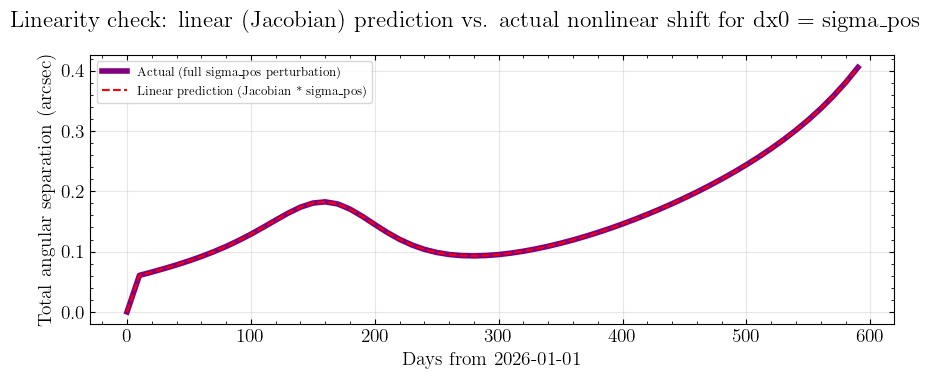
Finally, let’s check whether the linear error propagation in cov_sky is actually a good approximation at the input sigma_pos / sigma_vel levels. The Gaussian propagated through the Jacobian is exact for infinitesimal perturbations; if the input uncertainties are large enough that nonlinear dynamics matter over the integration window, the linearized cov_sky no longer represents the true distribution.
We test this along one direction (perturbing x[0]):
Linear prediction. Compute one column of the Jacobian numerically with a tiny perturbation (
tiny = 1e-9AU, well inside the linear regime). Scaling bysigma_posgives the linear prediction for the sky shift induced by a 1-sigma perturbation inx[0].Actual nonlinear shift. Re-integrate with the full
sigma_posperturbation applied and measure the actual change in (RA, Dec).
If the two curves track each other, the Gaussian represented by cov_sky is honest at this sigma level. If they diverge, the input uncertainty is large enough that linearization is breaking down and the propagated covariance is underestimating tails. (Caveat: this only probes one of the six input directions; perturbations in other coordinates could be more nonlinear.)
tiny = 1e-9 # AU (much smaller than sigma_pos, squarely in the linear regime)
cs_tiny = p.cartesian_state.replace(x=p.cartesian_state.x.at[0, 0].add(tiny))
eph_tiny = p.ephemeris(times, "kitt peak", state=cs_tiny)
J_ra_x0 = (np.array(eph_tiny.ra.rad) - ra) / tiny
J_dec_x0 = (np.array(eph_tiny.dec.rad) - dec) / tiny
# Linear (Jacobian-based) prediction: tangent-plane magnitude of the Jacobian column
# scaled by sigma_pos. The cos(dec) factor converts coordinate RA to on-sky arcsec.
pred_sep_asec = (
sigma_pos * np.sqrt((J_ra_x0 * np.cos(dec)) ** 2 + J_dec_x0**2) * RAD2ARCSEC
)
# Actual nonlinear shift: great-circle separation between nominal and perturbed trajectories.
cs_pert = p.cartesian_state.replace(x=p.cartesian_state.x.at[0, 0].add(sigma_pos))
eph_pert = p.ephemeris(times, "kitt peak", state=cs_pert)
actual_sep_asec = np.array(result[0].separation(eph_pert).arcsec)
fig, ax = plt.subplots(figsize=(9, 4))
ax.plot(
days,
actual_sep_asec,
label="Actual (full sigma_pos perturbation)",
color="purple",
lw=4,
)
ax.plot(
days,
pred_sep_asec,
label="Linear prediction (Jacobian * sigma_pos)",
color="r",
ls="--",
)
ax.set_ylabel("Total angular separation (arcsec)")
ax.set_xlabel("Days from 2026-01-01")
ax.legend(fontsize=9)
ax.grid(True, alpha=0.3)
fig.suptitle(
"Linearity check: linear (Jacobian) prediction vs. actual nonlinear shift for dx0 = sigma_pos",
y=0.95,
)
fig.tight_layout()
print(
"Ratio actual / linear-prediction at t=500: ",
actual_sep_asec[-1] / pred_sep_asec[-1],
)
Ratio actual / linear-prediction at t=500: 1.0000007666935116